In my research, I focus on parametric system identification, where a model based on physical principles is provided, but some parameters are unknown. The goal is to estimate these parameters using experimental data. Unlike non-parametric methods such as Subspace methods, Gaussian Processes, or deep Neural Networks, parametric methods benefit significantly from incorporating prior knowledge.
A robust and versatile framework for this task is the Prediction Error Method (PEM), which minimizes the error between measured data and model-based predictions over the parameter set. However, this approach often requires solving complex nonlinear optimization problems. My research began with developing an efficient algorithm to address these challenges.
Traditionally, PEM is designed for Linear Time-Invariant (LTI) systems. In my work [1], I demonstrated the method’s versatility by extending it to Linear Time-Variant (LTV) systems and systems with nonlinear input dynamics, while maintaining theoretical guarantees. Additionally, I found that this framework allows for the joint estimation of the noise model, crucial for designing state estimators.
Furthermore, in [1], I also developed and implemented a tailored Sequential Quadratic Program (SQP) for reliably and efficiently solving the resulting nonlinear optimization problems.
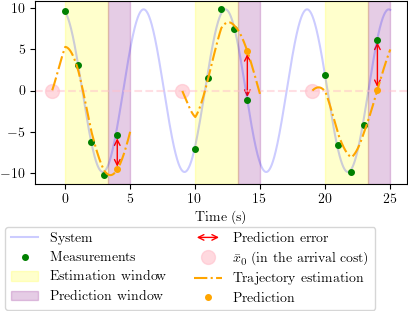
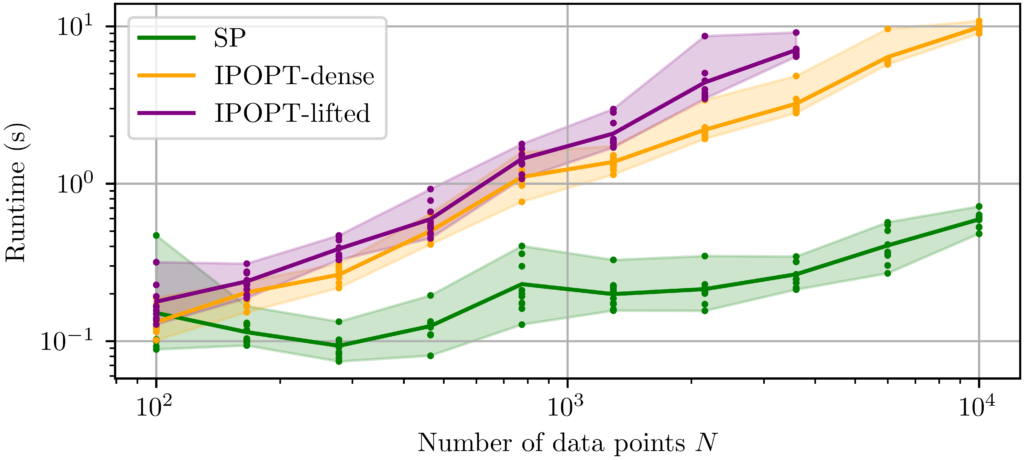
In my most recent research [2], I developed a variation of PEM for parametric nonlinear system identification using a Moving-Horizon State Estimator (MHE) for output predictions. This approach extends PEM to general parametric state-space nonlinear systems and facilitates efficient optimization. By computing output predictions using only a finite window of past data, it avoids the expensive propagation of derivatives over long data horizons. It also leaves room for parallel computation in the general case, and considerably reduces the complexity of the problem for LTI systems.
Importantly, we show this reduction in optimization complexity does not compromise the theoretical guarantees applicable to LTI systems.
In the next steps, I will design an algorithm for LTI parametric system identification, build upon the PEM variation [2], reducing the computational burden to its minimum, and guaranteeing asymptotic consistency of the estimate, even for closed-loop identification.
Checkout my open-source SysID package: MLE-LTV and MLE-LTI