Embedded learning and optimization for the next generation of smart industrial control systems
Real-Time Methods for Uncertainty-Aware
Predictive Control
Amon Lahr, ETH Zürich
Propagating uncertainties arising from inexact measurements and computations in the control feedback loop has the potential to improve the robustness and reliability of the control loop, as well as to distribute computational resources among subcomponents of the controller for maximum closed-loop performance. The goal of this thesis is to explore these potentials, developing real-time capable algorithms factoring in different sources of uncertainty. Some specific projects are outlined in the following.
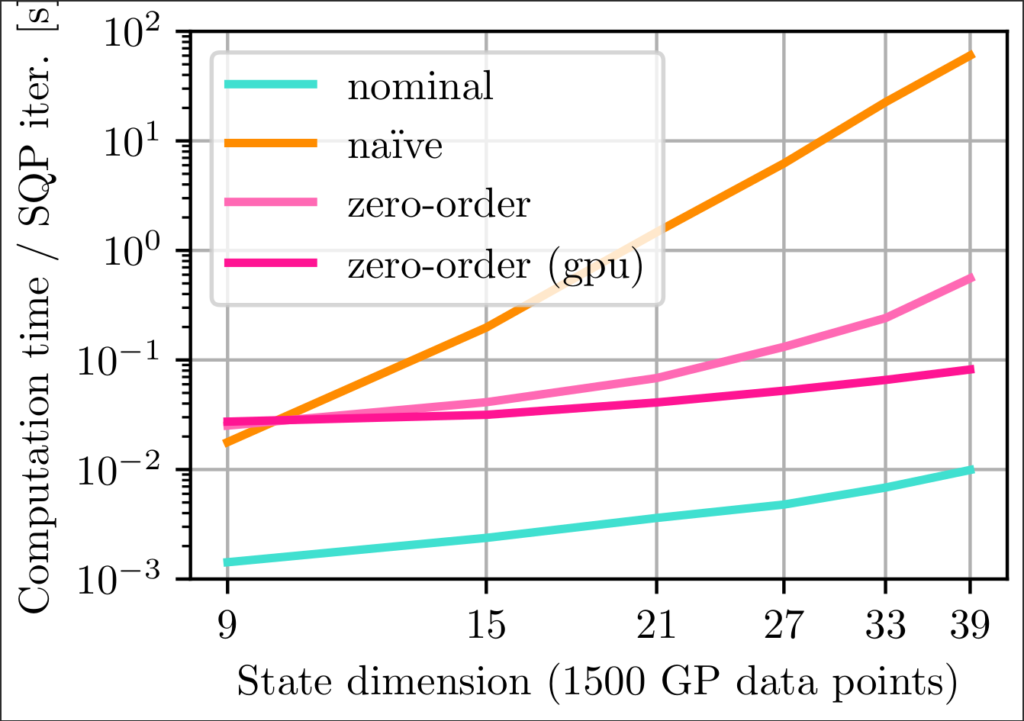
Zero-Order Optimization for Gaussian Process-based Model Predictive Control
By enabling constraint-aware online model adaptation, model predictive control using Gaussian process (GP) regression has exhibited impressive performance in real-world applications and received considerable attention in the learning-based control community. Yet, solving the resulting optimal control problem in real-time generally remains a major challenge, due to the increased number of augmented states in the optimization problem, as well as computationally expensive evaluations of the posterior mean, covariance and their respective derivatives. To tackle these challenges, we employ a tailored Jacobian approximation in a sequential quadratic programming approach (zoRO-21) and combine it with a parallelizable GP inference and automatic differentiation framework. The proposed algorithm computes suboptimal, yet feasible, solutions at drastically reduced computation times and exhibits favorable local convergence properties. Numerical experiments verify the scaling properties and investigate the runtime distribution across different parts of the algorithm.
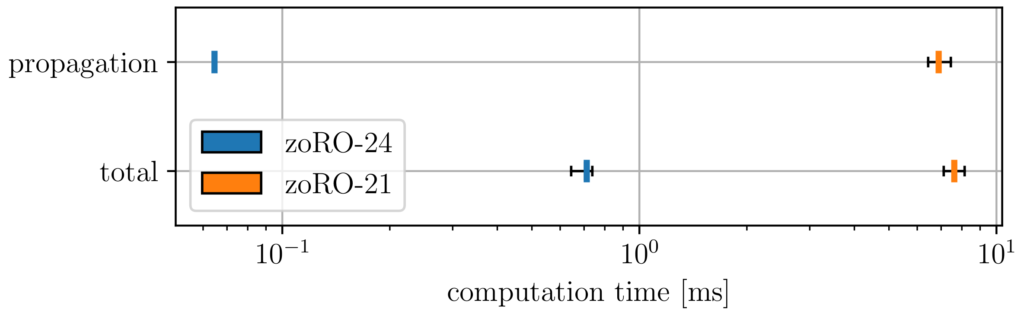
Efficient Zero-Order Robust Optimization for Real-Time Model Predictive Control with acados
This work tackles the high-performance implementation of the zero-order optimization method for robust and stochastic model predictive control in the open-source real-time optimization framework acados. By utilizing BLASFEO for the linear algebra operations involved in the covariance propagation, as well as optimizing the execution of the code for its use in the Real-Time Iteration, the novel implementation (zoRO-24) drastically reduces the computational overhead of the original implementation (zoRO-21).
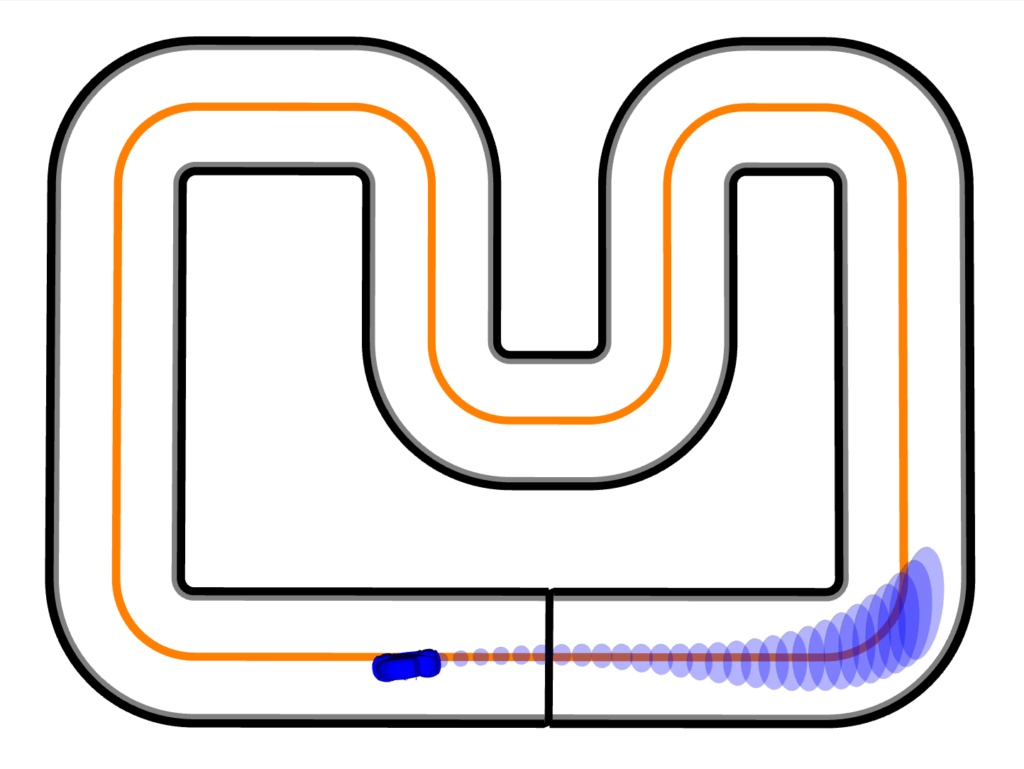
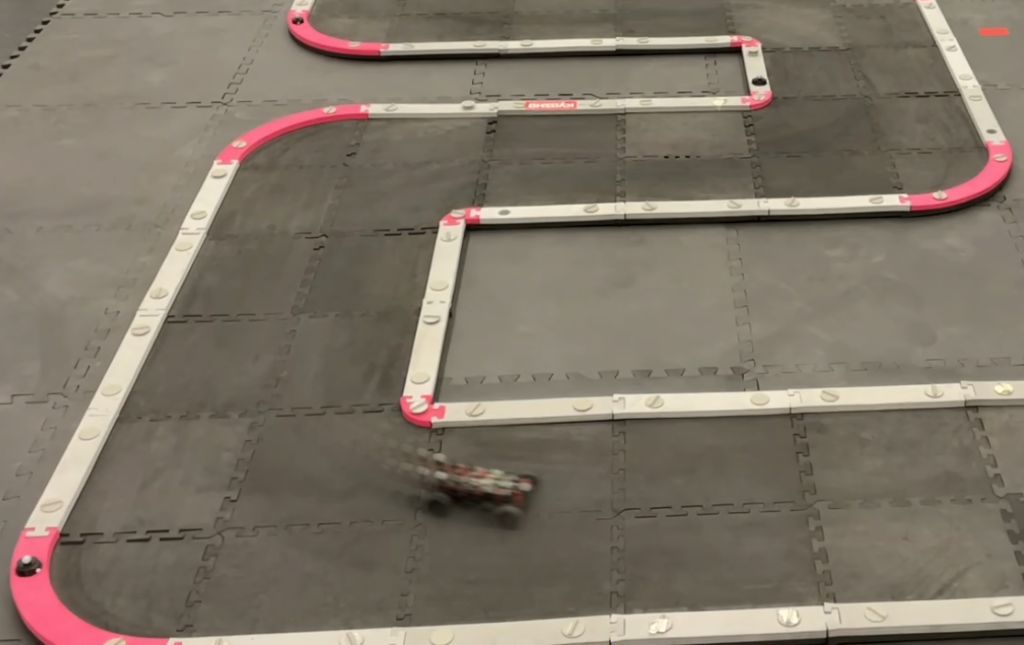
Real-time Gaussian Process-based Model Predictive Control for Autonomous Racing
Ongoing semester project by Joshua Näf, under the supervision of AL and Andrea Carron.
By extending the zoRO-24 method to incorporate state-dependent uncertainties, the zero-order GP-MPC method can benefit from the high-performance zoRO-24 implementation. The resulting method, which is currently under development, has been applied successfully to an autonomous miniature racing platform, allowing for increased GP model complexity compared to state-of-the-art implementations.