Embedded Learning Based Model Predictive Control for Autonomous Driving
Jean Pierre Allamaa, R&D ADAS & Controls, Siemens Digital Industries Software
Autonomous driving that aims for more safety, comfort, and environmentally friendly vehicles, have been growing rapidly in automotive industry recently. Among the several components that go into an autonomous vehicle, is the controller or the decision making brain.
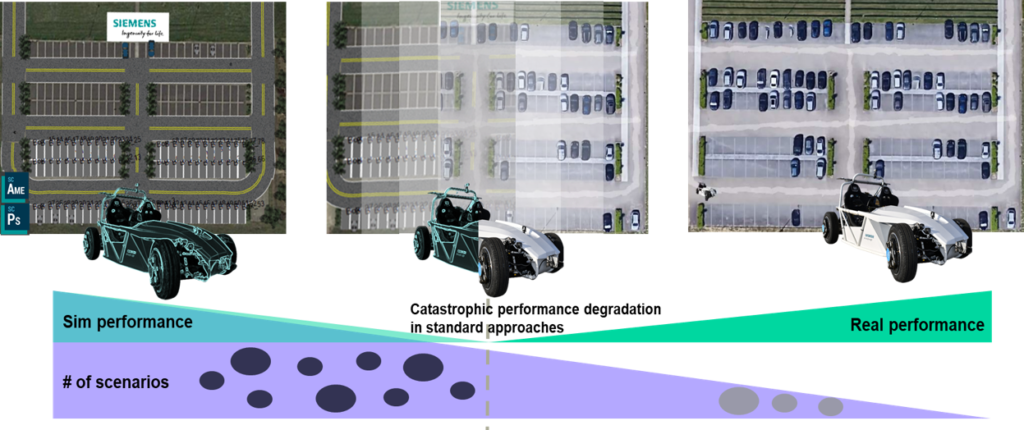
Nonlinear model predictive control (NMPC) for autonomous systems has been extensively studied in academia and industry as an advanced control strategy incorporating by design safety and comfort, and capable of achieving high-performance. NMPC has shown promising results in engineering applications such as robotics and autonomous driving, specially in the context of safety critical scenarios where constraints have to be satisfied alongside an optimal decision making. However, two main challenges remain in the transfer of the NMPC to the real-world: 1) critical real-time (RT) implementation and ease of prototyping 2) catastrophic performance degradation due to a difference between simulation and real environment.
In this project we researched the topic of transferring an ADAS module from simulation to the real world (Sim2Real). Sim2Real technology deals with transferring knowledge in simulation to the real systems in an efficient way, that reduces real experiments time and cost, data collection and manual tuning efforts. In particular, we focused on three main aspects:
- Frameworks for enabling fast verification and validation of the developed controllers in simulation, hardware, and real-world physical testing.
- Certifiable and safe optimal controllers.
- Leveraging Digital Twin and data-driven approaches to adapt and robustify the controllers against real-world uncertainties.
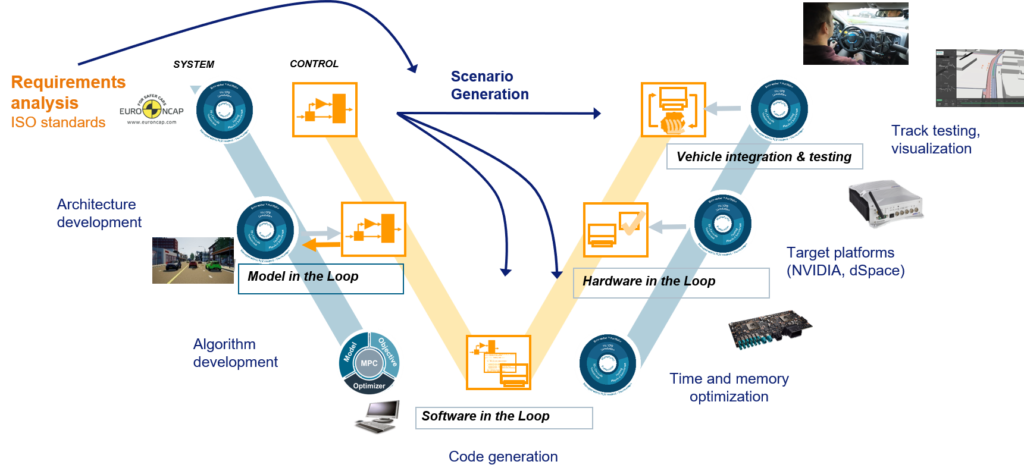
Rapid Control Prototyping in X-in-the-loop testing
The first part of the project concerns a development framework for designing, validating, and implementing advanced autonomous driving controllers. The validation process satisfies the automotive industry requirements as it progresses from ISO standards scenarios, to the different X-in-the-Loop applications (Model-in-the-Loop, Hardware-in-the-loop, Vehicle-in-the-loop). The framework allows testing in real and/or virtual environments with Digital Twins of the dynamics, sensors and environment in Simcenter software. In particular, the framework has been used in an easy plug-and-play to validate motion planning algorithms such as real-time nonlinear model predictive control and AI-driver models such as Reinforcement Learning.
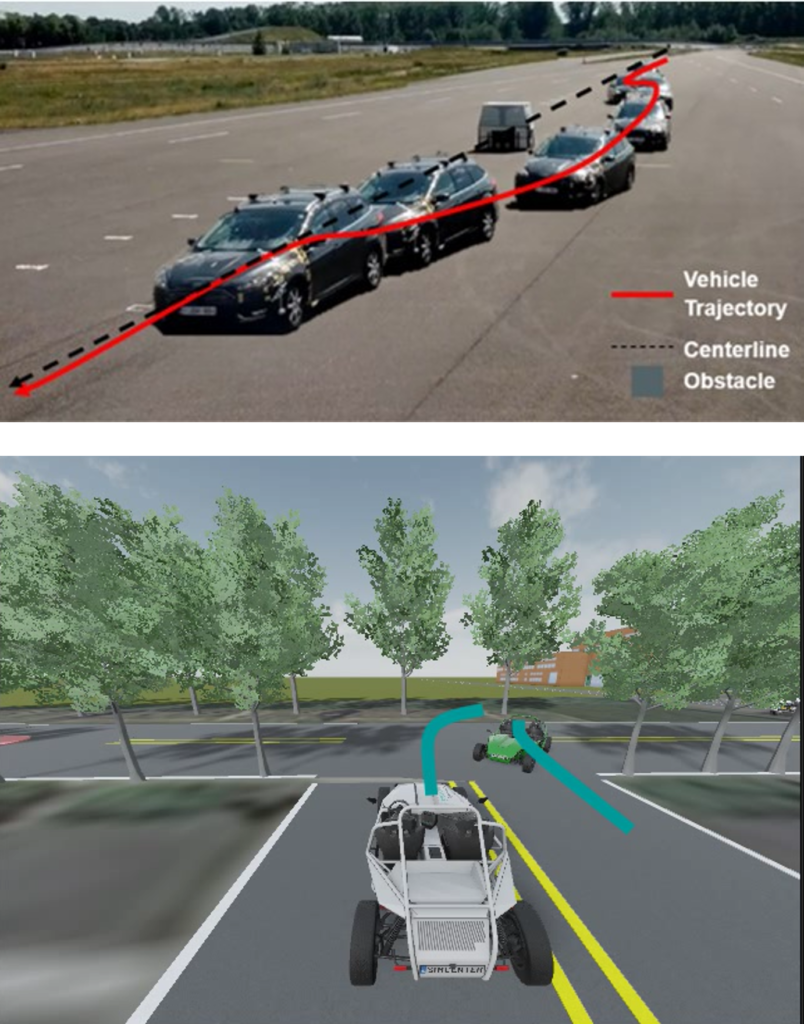
Real-time MPC control development for safe navigation
The use of NMPC in practice on Electronic Control Unit (ECU) is limited by the heavy computation due to the numerical optimization routines. For this, we present a novel approach to formulate the numerical program for optimal control problems that can speed up the onboard computations by a factor of 9 compared to the state of practice. The solution is scalable to any sampling time allowing a more favorable and orders faster real-time NMPC deployment than standard approaches and contributes as a first safety layer to autonomous driving control.
The navigation of the vehicle relies on a special set of continuous splines that can guarantee a safe tracked trajectory in the look-ahead of the MPC. We also augment our navigation controller, with collision avoidance capabilities through an advanced type of constraints known as Control Barrier Functions. The overall new formulation is demonstrated in simulation and reality, for a multitude of maneuveurs, in presence of several moving obstacles, at both low and high-speeds.
Sim2Real transfer of NMPC through automatic adaptation
Finally, we addressed the problem of transferring an autonomous driving (AD) module from one domain to another, in particular transferring the parametrizable NMPC from simulation to the real world (Sim2Real). We proposed a data-efficient method for online and on-the-fly learning based adaptation for parametrizable control architectures such that the target closed-loop performance is optimized under several uncertainty sources such as model mismatches, environment changes and task choice. The novelty of the work resides in leveraging black-box optimization enabled by executable digital twins, with data-driven parameter tuning through derivative-free methods to directly adapt in real-time the NMPC. Specifically, we validated our approach in real-world experiments and show the ability to transfer and safely tune a nonlinear model predictive controller in less than 10 minutes, eliminating the need of day-long manual tuning and hours-long machine learning training phases.