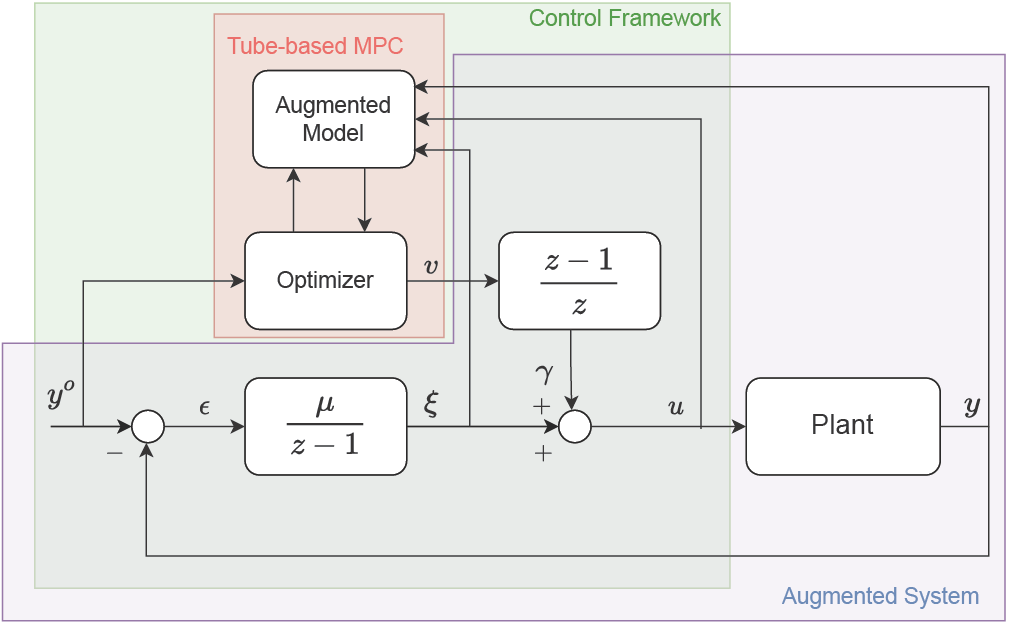
The goal of this project is to design a control system such that the controlled output tracks a given constant reference signal y in a robust way. The proposed control scheme is shown in the left figure. The regulator is made of three main blocks: an integrator of the output tracking error, an MPC algorithm, and a derivative action.
1. The integrator acts on the output tracking error so that, in light of the Internal Model Principle, it is ensured that error converges to zero.
2. The MPC algorithm provides improved performances in transient conditions and the fulfillment of input and output constraints, while at the steady state, its action is null due to the derivative action acting on its output. In addition, a tube is designed to ensure robustness in the presence of disturbance.
3. The derivative action allows to achieve stability results for the overall system by means of a standard zero terminal constraint formulation of MPC.